製作編37
加工を行ったボトムシャーシに部品を取り付けます。
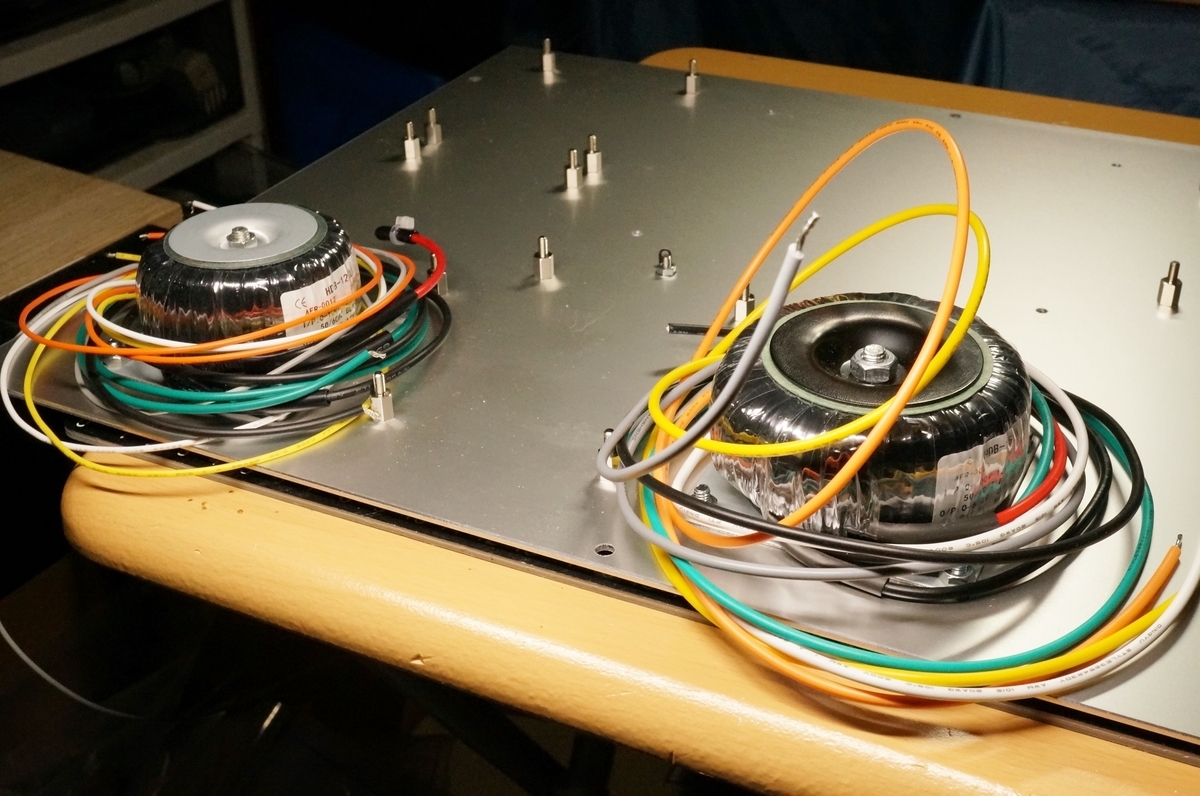
トランス取り付け
トランスはアナログ系電源用とデジタル系電源用の2個です。どちらもM4のネジで固定します。最初にアナログ系電源用トランスを取り付けます。取り付けの向きは後で電線の処理が楽になるように決めました。

このトランスも未使用電線を処理します。具体的には一次巻線AC120V電線です。φ2.5の端末処理キャップを被せてインシュロックで固定しました。

次にデジタル系電源用トランスを取り付けます。このトランスはデジタル系実負荷動作確認時にすでに未使用電線を処理済みです。取り付け向きは迷いましたがエイヤーで決めました。
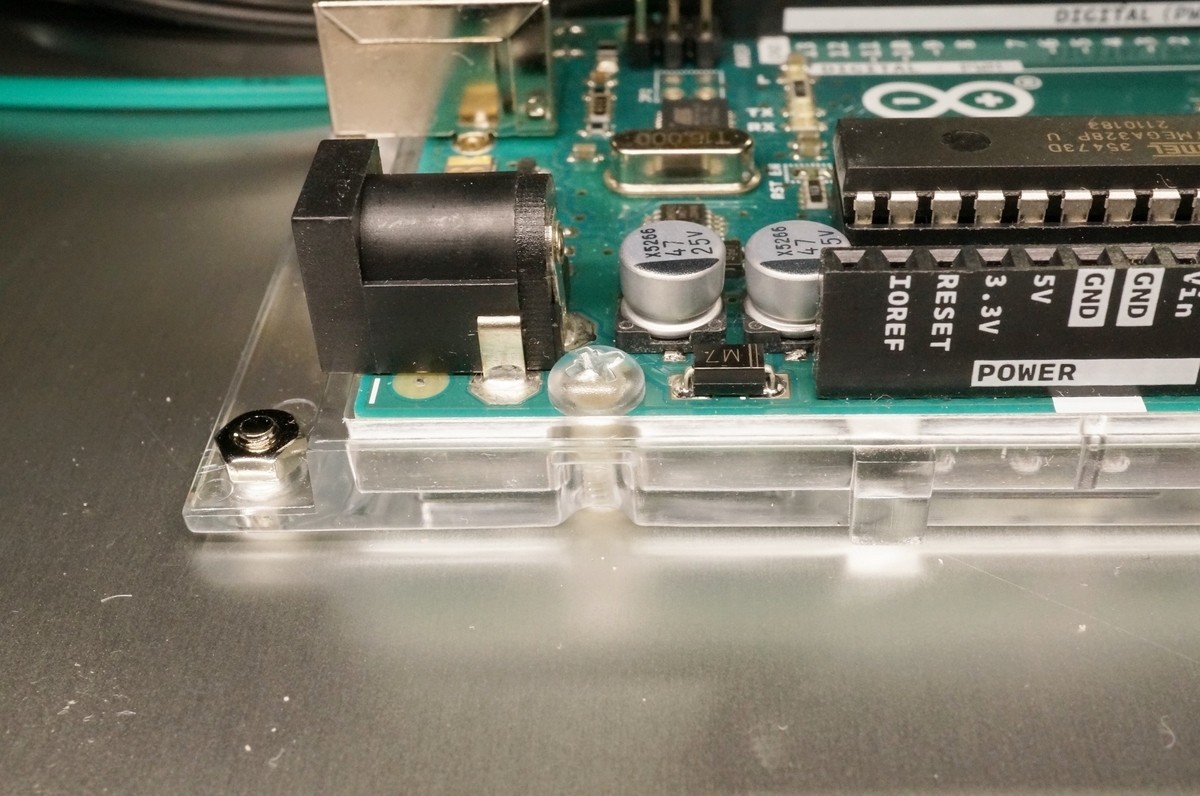
arduino UNO取り付け
最初にプラスチック製のホルダを取り付けます。M2.6のネジとナット2本で固定しました。次にarduino UNOを取り付けます。端子台を実装したシールド基板を一旦取り外し、取り付けネジにアクセスできるようにして、プラネジ2本でarduino UNOをホルダに固定しました。
改めてシールド基板を取り付けます。
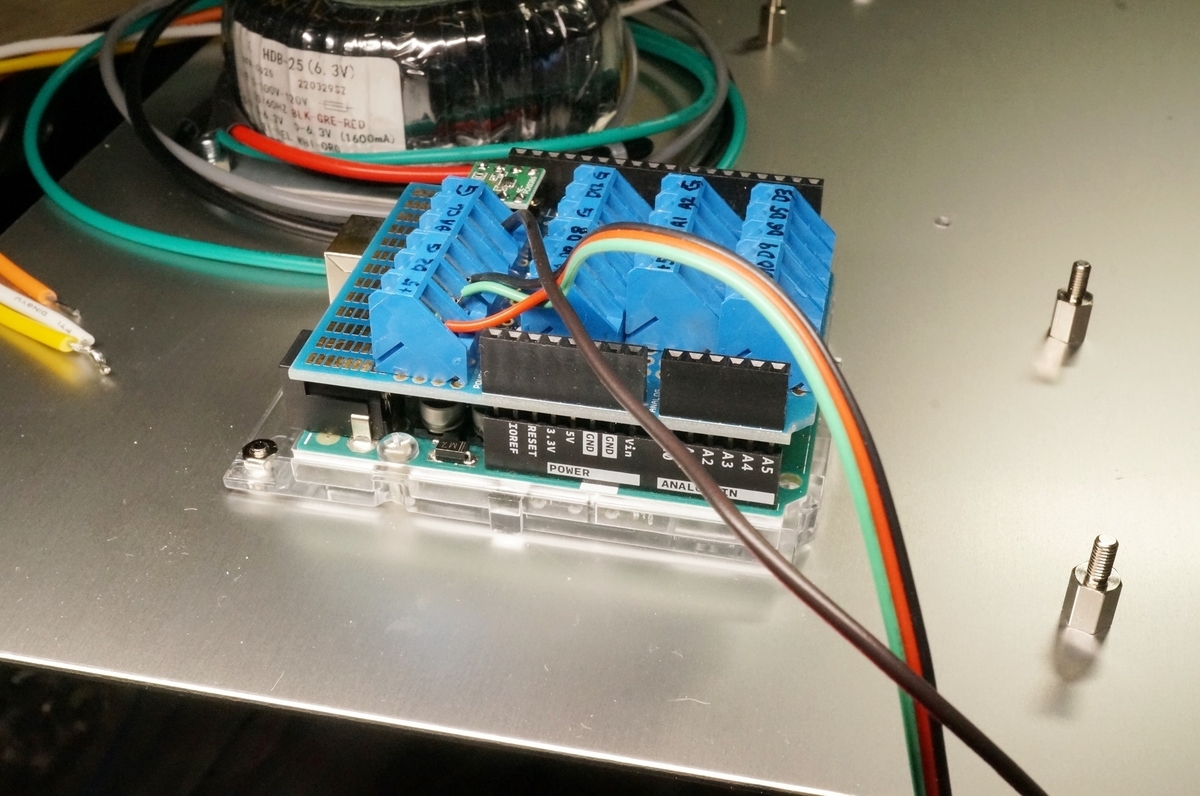
これでマイコン基板の取り付けは完了です。
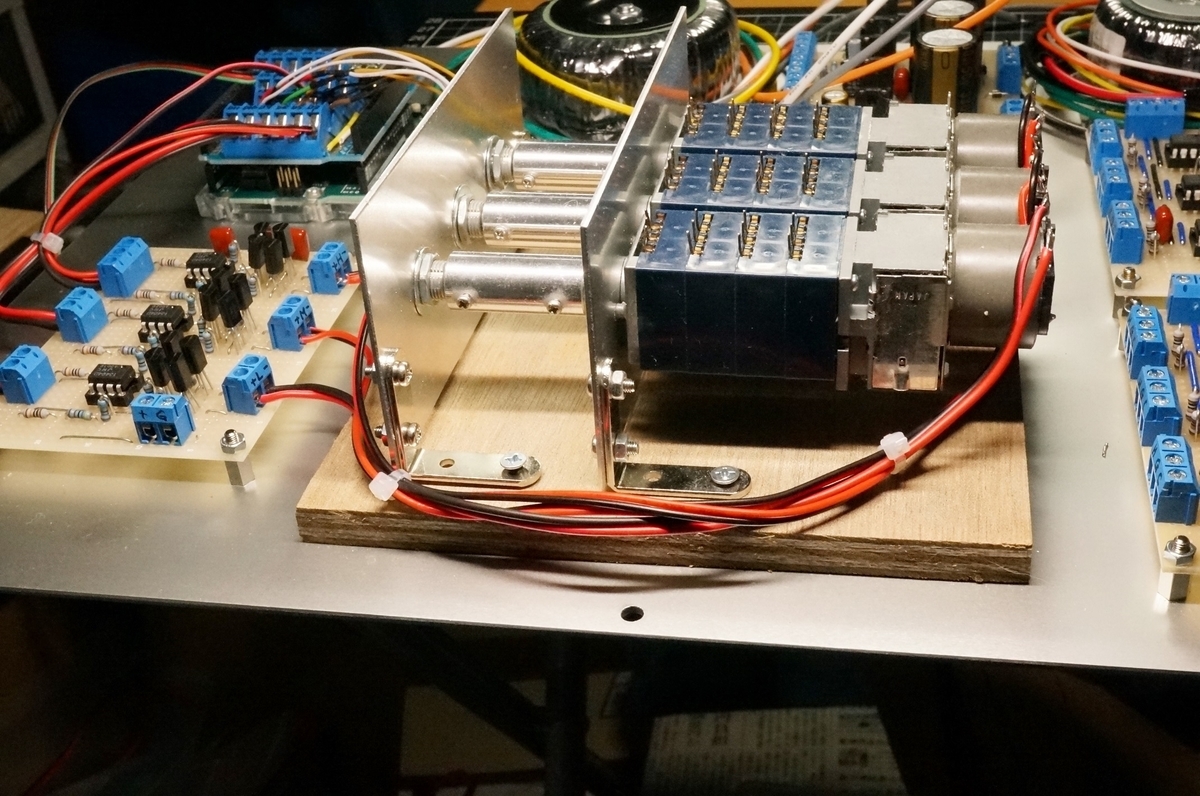
モーターボリュームAssy取り付け
次はモーターボリュームAssyを取り付けます。取り付けはM3の木ネジを使用します。モーターボリュームAssyのベースの合板には、あらかじめ取り付けネジ位置に下穴を開けています。そこをめがけて木ネジを止めていきますが、穴位置あわせに苦労しました。
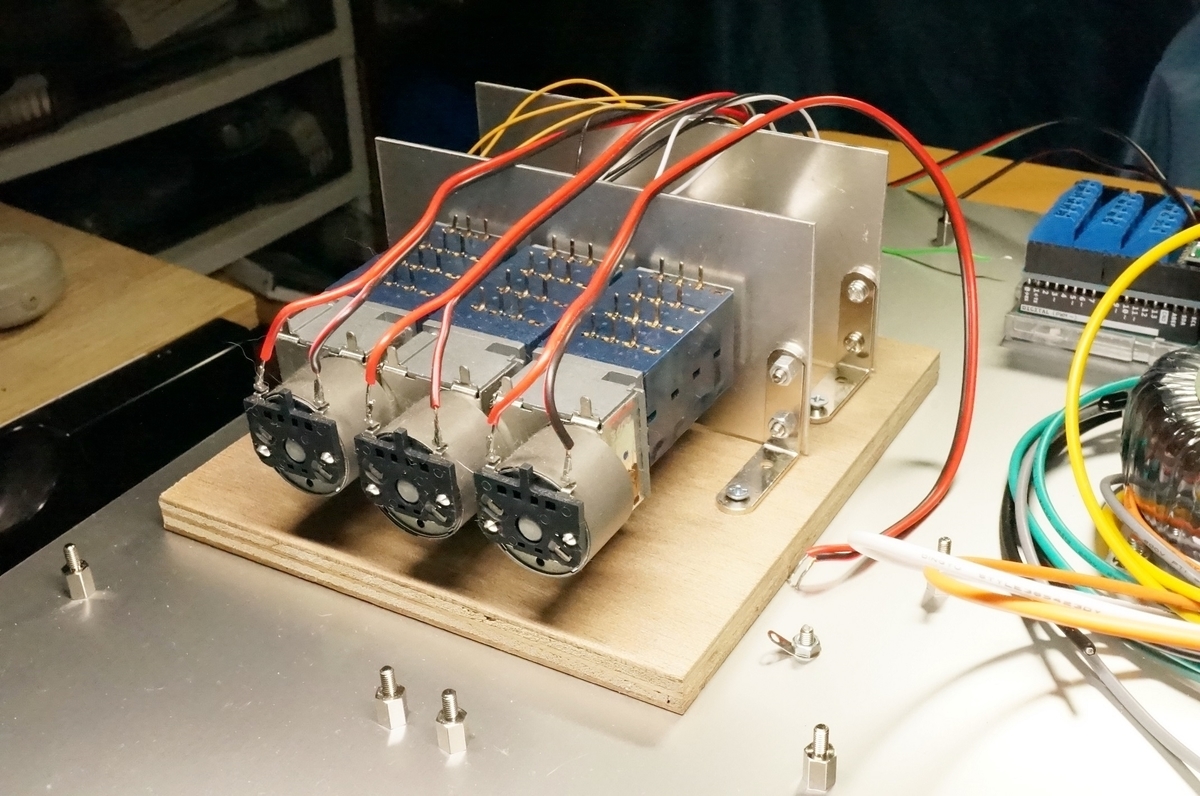
ベースの合板に多少の撓みがあり、ボトムシャーシへの取り付けで矯正されて、モーターボリュームと位置検出用ボリュームに想定外の力が加わっていないか心配です。動作確認まで影響の有無はわかりません。
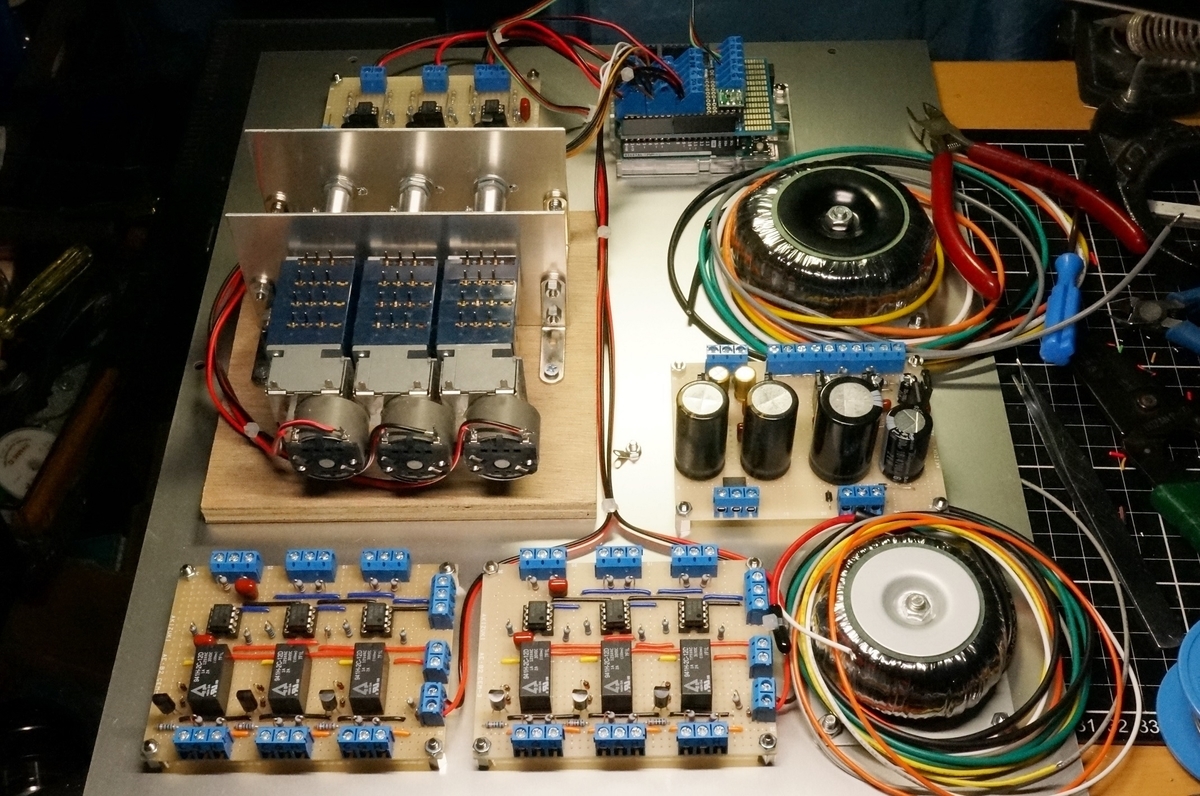
基板取り付け
残りは基板取り付けです。スペーサー取り付け時に基板取り付け確認済みなので、4本のナットの固定のみの作業です。取り付けはバッファー基板2枚とモータードライバ基板および電源基板の4枚です。
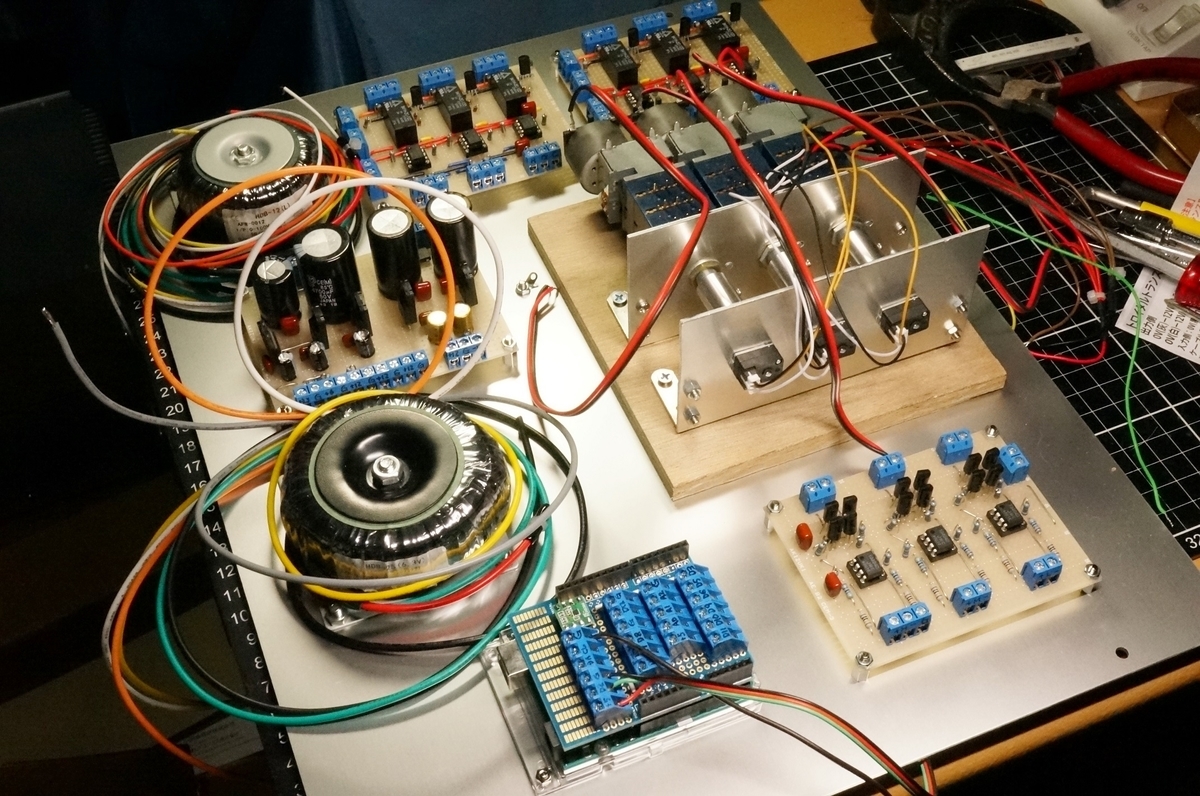
これでボトムシャーシへの部品取り付けは完了です。
配線
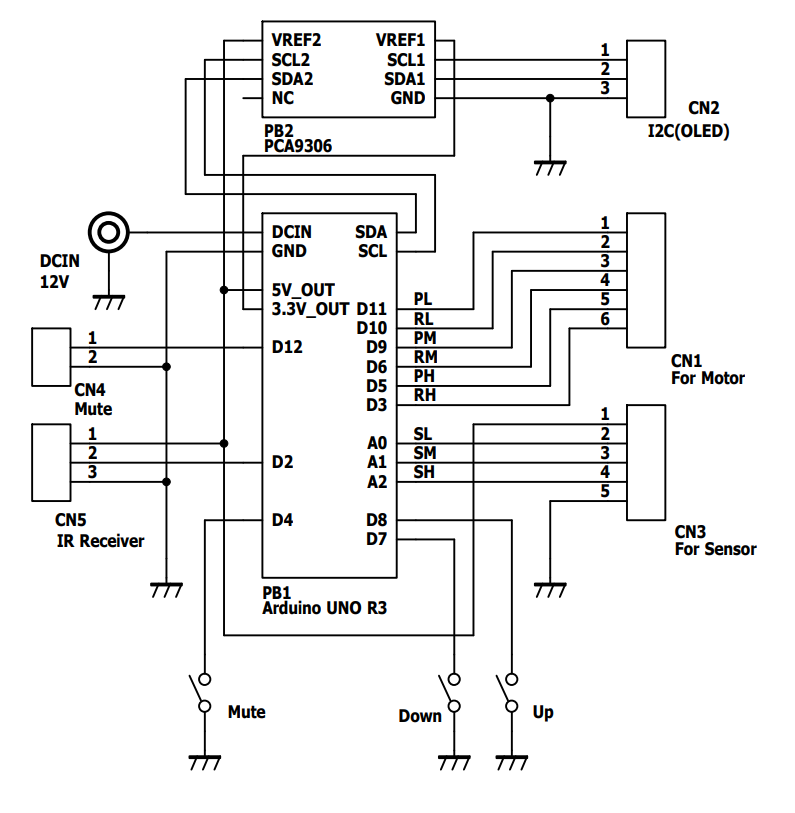
ボトムシャーシに取り付けた部品間の配線を行います。但し電源出力配線は後回しにします。電源単体の動作確認後に配線を行う予定です。改めてマイコン系の回路図を掲載します。
最初は位置検出用ボリュームとマイコン間の配線を行いました。配線の量が多いので、シンプルな束線を意識しました。
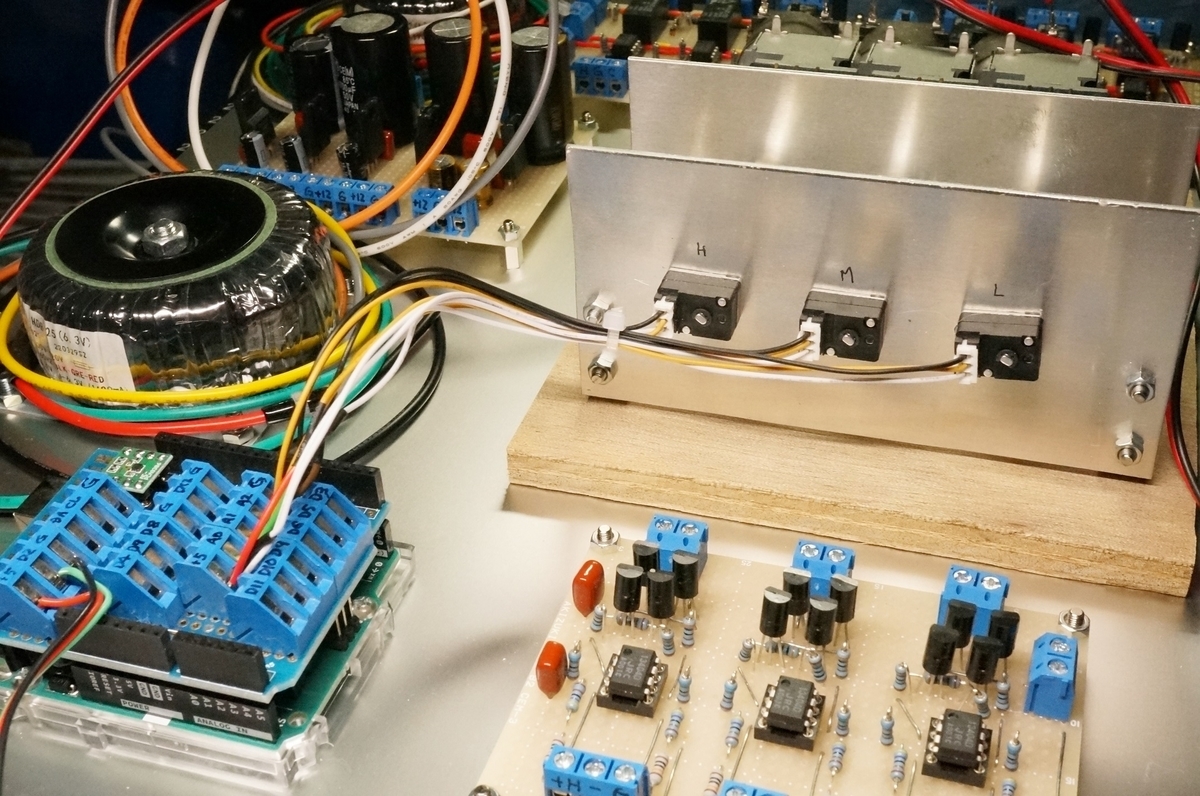
次はマイコンとモータードライブ基板間の配線を行います。具体的にはLo/Mid/HighのペアとGND配線です。
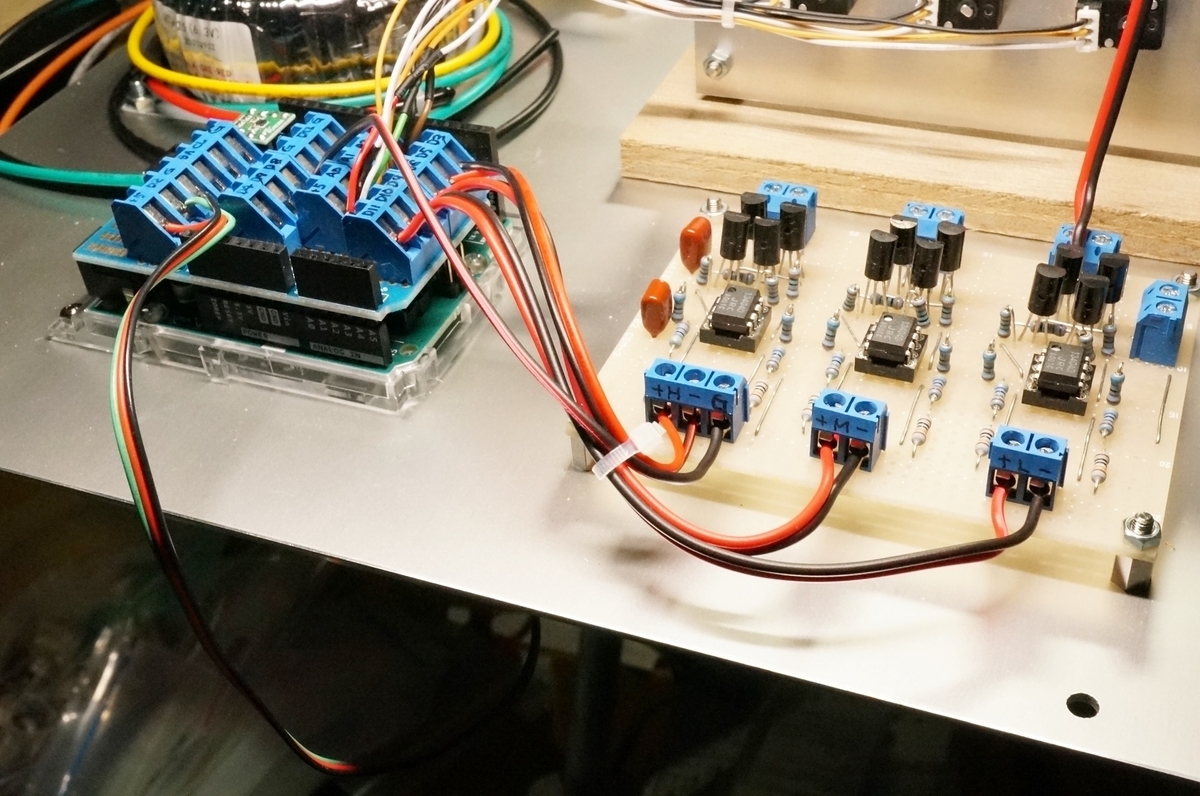
続いてモーター配線を行います。PWM信号を電送するので、信号線とできるだけ離す事を考慮しました。
次はミュートコントロール信号配線を行います。マイコンのポートとバッファ基板2枚間の配線です。この配線も見栄えを意識しました。
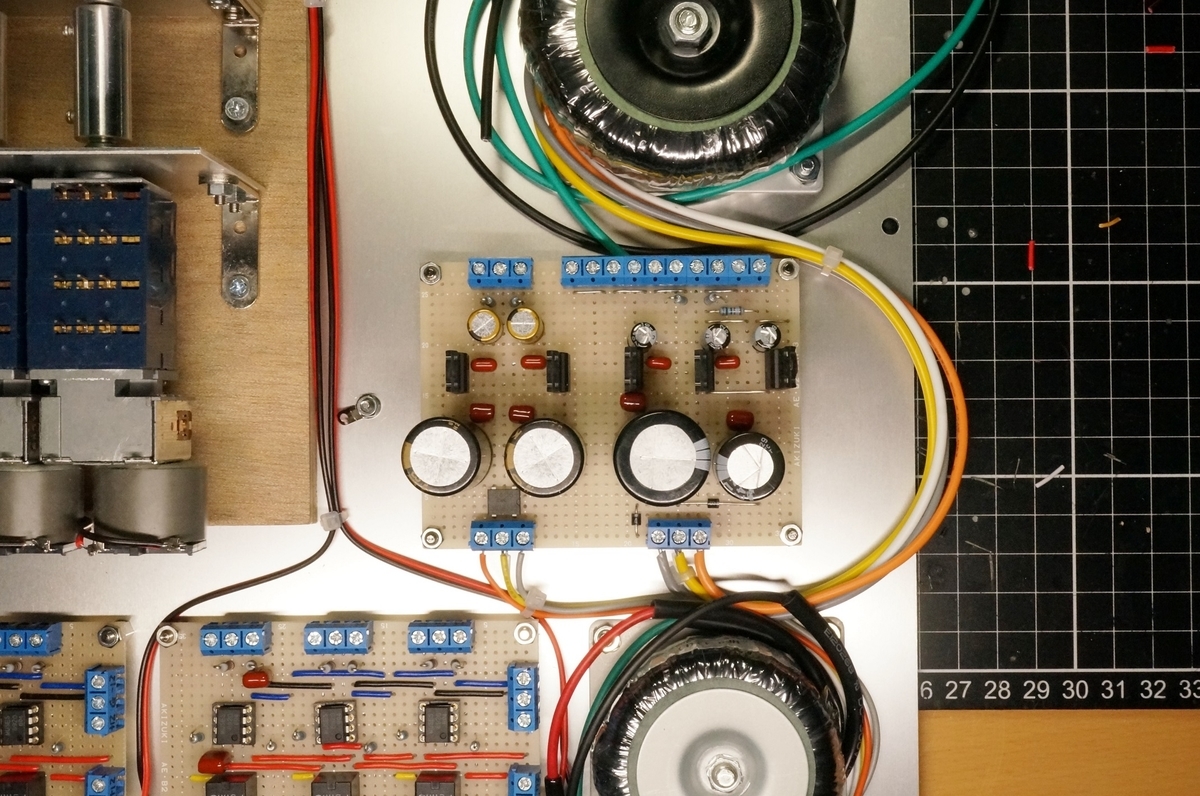
続いて電源基板の入力配線を行います。2つの電源トランスの2次巻線と電源基板間の配線です。デジタル系は実動作確認済みですが、アナログ系は未確認です。トランスの2次巻線の位相確認を行っていませんが、トランス添付の仕様を信じて配線しました。
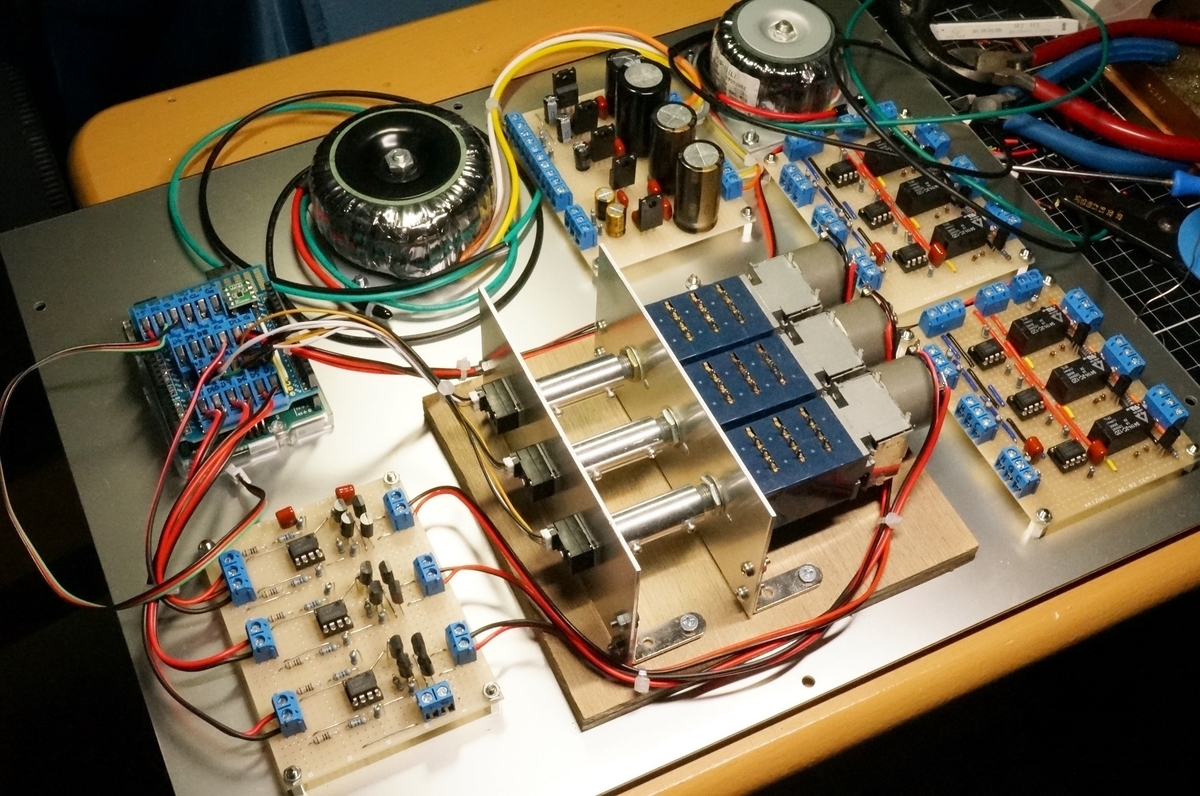
電源出力配線と信号配線を除くとシャーシ実装部品間の配線はこれで完了です。(本記事アイキャッチ写真参照)次回はフロントパネル加工と組立を行います。
つづく(製作編38)